前言
随着城市土地资源日趋紧张,智能机械式立体车库成为商业商圈、住宅小区、公共交通枢纽扩容停车空间的核心方案。而车辆搬运设备作为立体车库的核心执行单元,其运行稳定性、存取效率、适配性与安全性,直接决定车库整体运营能力与使用体验。
本文介绍的机械式立体车库伸缩齿搬运器,是专为各类智能立体车库、平面移动停车系统研发的专用车辆搬运设备,摒弃传统车台板搬运模式,采用无台板伸缩梳齿交接技术,可高效完成车辆平移、升降对接、车位精准存取等核心动作。下文将结合设备全落地使用场景,深度拆解其精细化电气设计细节,全方位解析产品的实用价值与技术优势。
相较于传统搬运方式,这款伸缩齿搬运器核心优势集中于高适配、高稳定、高安全、三大维度。产品采用轻量化紧凑结构设计,可适配不同轴距、底盘高度的民用车辆,突破传统设备的车型限制;依托成熟的电气控制系统,实现低速平稳启停、高速稳定搬运,大幅提升车库存取车效率;搭载全套电气安全防护机制,可适应车库潮湿、多尘、长时间连续运行的复杂工况;同时模块化电气布局设计,大幅降低设备故障概率与后期运维难度。
目前在用的伸缩齿搬运器按照其驱动方式可分为两种,一种为普通电机驱动,另一种为伺服电机驱动。其在动作原理上并无区别,但在传动设计及电气控制设计上存在着天壤之别。

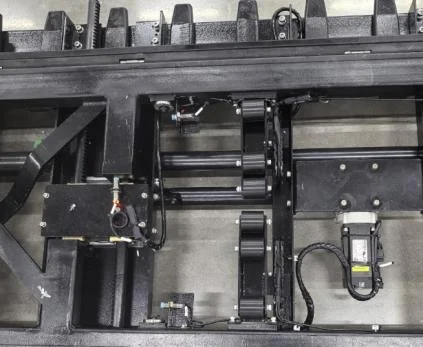
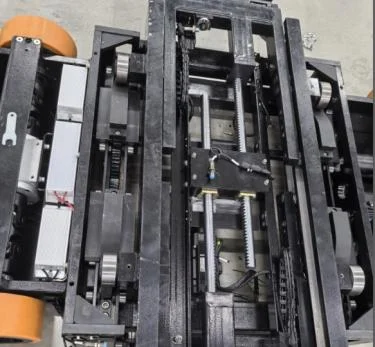
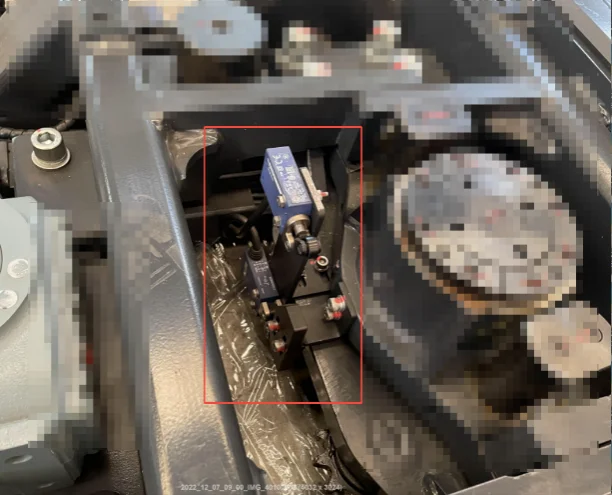
伺服伸缩齿

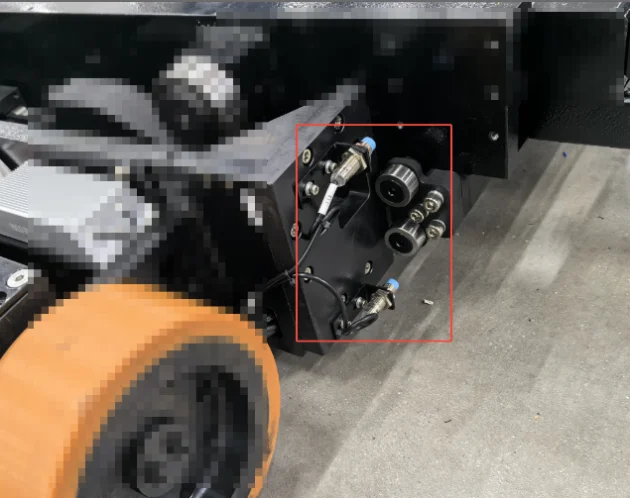
三相电机伸缩齿
由上图可见,无论从设备结构还是电气布局都完全不一样,下面将从电气角度详细分析两者之间的区别,重点阐述伺服控制搬运器的电气设计注意点。
电气设计细节深度拆解
一、检测原理
两种搬运器的检测原理基本相同,因为机械结构设计的区别,导致检测的方式有较大区别。
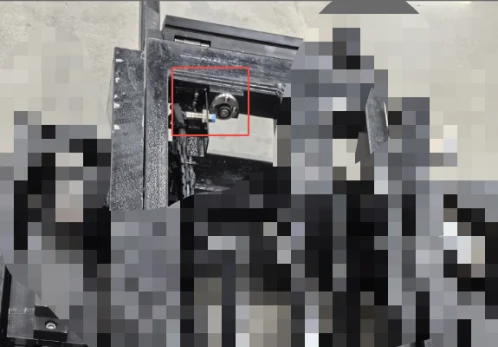
1-定位传感器设计方式
两种搬运器的定位传感器,一种采用磁性开关,一种采用镜反射开关。
两种定位方式都是依靠传感器找定位块的方式进行定位。
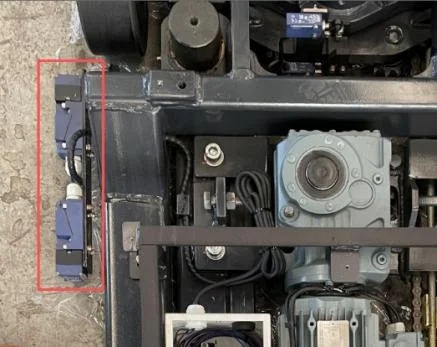
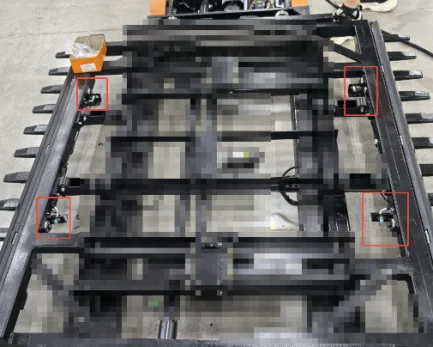
2-伸缩齿收回传感器检测

三相电机版前部和后部伸缩齿收回开关
伺服电机板前部和后部伸缩齿收回到位传感器
检测伸缩齿收回方式一样,都是依靠检测梳齿架本身的位置来触发开关。
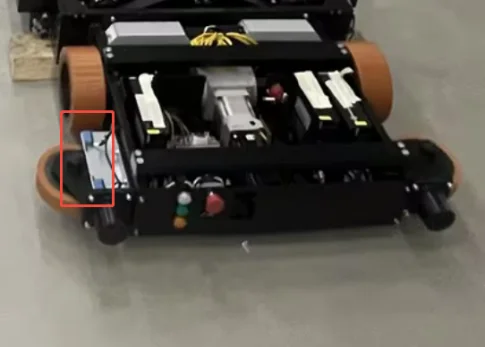
3-伸缩齿伸出传感器检测
伺服电机版前部和后部伸缩齿伸出开关


三相电机版前部和后部伸缩齿伸出到位
两种设备伸出到位检测方式一样,原理都为伸缩翻板触碰到车轮后,感应到传感器触发信号。
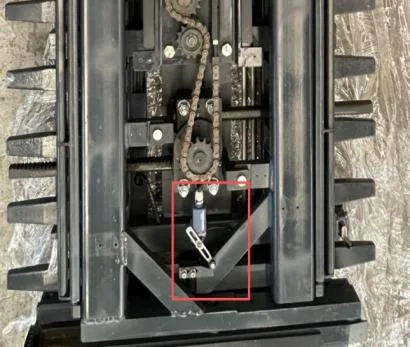
4-顶升上下到位检测
两种设备的顶升到位检测方式基本相同,开关固定,通过检测升降到达位置来确定升降是否完成。
二、电控系统
1-电控硬件系统设计
伺服设备采用分布式模块化电气架构,整体控制系统由主PLC控制器、伺服驱动模块、传感检测模块、伸缩执行模块、通讯交互模块五大单元组成,各模块独立运行、协同联动。模块化设计优势显著,一方面电路布线规整、线路分区清晰,强弱电分离布局,有效避免线路交叉干扰,降低短路、漏电故障概率;同时标准化电气接口设计,完美适配市面主流立体车库控制系统,兼容性极强。

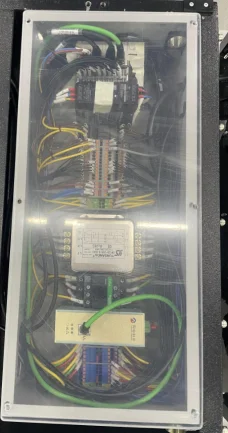
防尘透明盖板设计,可在不拆盖的情况下观察内部情况,尽量增加检修的便利性。控制箱于设备固定处采用缓冲垫隔离,设备运行时的震动能大部分被隔离垫所吸收。另外,所有的接线端子均采用弹簧压接,杜绝设备震动导致的接线松动问题。
搬运器上有完整的控制系统,所以伺服搬运器能够作为一个标准品的形式存在,仅需对其进行三相供电即可,其余通过无线通讯即可实现动作控制。
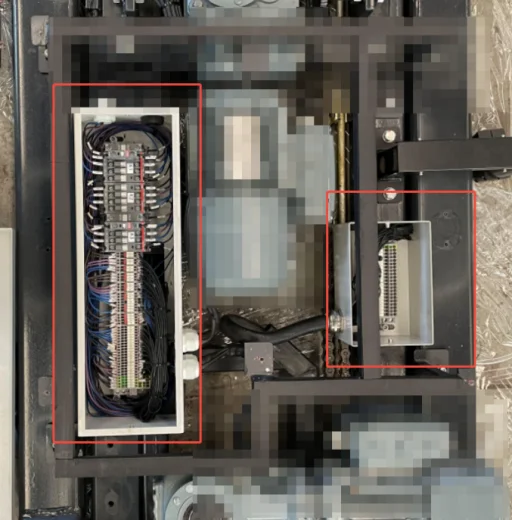
三相电机版搬运器中的电箱仅配置接触器和接线端子,因为空间的限制,控制系统无法集成于搬运器内部,必须将设备的信号及控制输出到外围进行控制。故该搬运器上需要连接两组电缆,一组控制为控制电机输出的强电系统,一组为采集搬运器所有控制信号的电缆。两组电缆线芯较多,并且外部需要两组弹簧卷筒进行线缆收放控制,从总的成本控制和设备稳定性来讲,并不如伺服版本的高。
2-电气控制系统的设计
设备搭载高精度智能逻辑控制电路,依托PLC核心控制系统,搭配伺服驱动闭环控制算法,实现行走、伸缩、对位、交接全流程精准控制。控制系统内置自主适配逻辑,可根据车辆重量、轴距、停放位置偏差,自动微调伸缩齿伸缩行程与行走轨迹,实现无偏差精准交接车辆,同时电路集成故障自检与智能反馈功能,设备运行过程中实时检测线路状态、传感器数据、电机工况,一旦出现异常,立即触发声光报警并记录故障代码,同步上传至车库中控系统,方便运维人员快速排查故障。此外支持自动启停、联动升降、智能调度等功能,可适配多设备协同作业,大幅提升车库整体存取效率。
相比于伺服控制系统,传统的三相电机控制依托于变频器,变频器控制在实现精准定位方便远不如伺服控制系统,并且电机的响应速度也差距明显。这两种主要的差别导致存取车速度存在明显区别,伺服系统比三相电机系统速度快30%。
但传统三相电机并不是毫无优势,因为其采用普通电机,故对于环境要求不高,在高温高湿及震动环境下,设备表现稳定。并且其不依赖于通讯对其控制,直接排除了由于通讯速度或通讯故障导致的设备运行延迟或无法控制的情况,搬运器一般和横移车配套使用,采用一个PLC同时控制横移车和搬运器,从内部数据交互来考虑更加及时稳定可控。
结尾总结
以上就是对伸缩齿搬运器两种不同结构的分析和比对,作为立体车库的核心部件,两种搬运器各有优缺点,需要根据不同的项目进行匹配。未来随着智能停车行业不断升级,产品将持续优化电气智能控制与节能技术,适配更多智能化、集约化停车场景,为城市静态交通提质增效、空间扩容提供核心设备支撑。
About the Author